









接上篇:
2)在研究充电动态特性时,可以将电池近似地看为一个大 电容和一个小电阻,用图5的简单模型表示。其中:U是充电电压,IC是充电电流。 ICRs+UC=U 其中 IC=CdUC/dtUC=a+bexp(-t/T) 则 IC=dexp(-t/T) 其中:a,b,d为常数;T为时间常数,T=RsC。在恒压充电期间,电池等效内阻Rs近似不变,则充电电流按指数规律衰减。 图6是变压间歇充电的曲线图,和图1相比较可以看到,这种充电曲线能够充分模拟最佳充电曲线。试验结果验证,这种充电方法的确能够有效地提高充电的速度和效率。
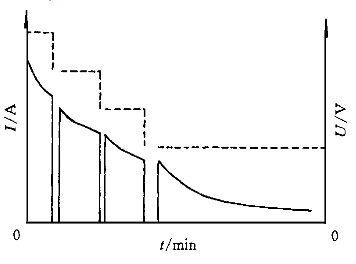
图6 变电压间歇充电曲线
3)从工程角度来看,恒压控制更容易实现。
3 充电电源
目前市场上有许多充电集成电路,但大多是针对小功率充电器的,大功率充电器则需要自行设计相应的充电电源。传统的充电电源主要是相控电源,因为包含工频变压器造成电源本身体积较大,且功率损耗也很大。开关电源由于开关频率比较高,所以有体积小、重量轻、损耗小和效率高等特点。开关电源的发展非常迅速,其应用也日益广泛,有逐步取代传统电源的趋势。笔者根据系统的要求,设计了30kHz的高频开关电源作为充电电源。高频电源中的损耗主要有导通损耗、开关损耗、截止损耗和磁芯损耗,其中导通损耗和开关损耗占据很大的比重。为了有效地降低开关损耗和导通损耗,选择IGBT作为功率开关管。IGBT是一种新型复合器件,它集双极型功率晶体管和MOSFET的优点于一体,具有电压型控制、输入阻抗高、驱动功率小、控制电路简单和元件容量大等优点。功率开关管的驱动电路选用专用的IGBT驱动集成电路EXB841,用于驱动大容量、高速IGBT(容量在300A,1200V以下,频率在40kHz以下)的专用驱动芯片;它由放大部分、过流保护部分和5V电源基准部分组成。过流保护部分实现过流检测和延时保护功能,能够提供+15V和-5V2种电压,以满足IGBT开通时所需的正偏压和关断时所需的负偏压。
在系统中,设计了移相式零电压全桥逆变电路,其电路原理图和波形图见图7。这种变换器是在恒频变换器和移相控制谐振变换器两者的基础上发展起来的,它利用变压器的漏感和开关管的寄生电容来实现零电压;采用移相控制,每相桥臂的导通相差一个移相角。系统中采用的移相控制芯片是美国Unitrode公司生产的UC3875。
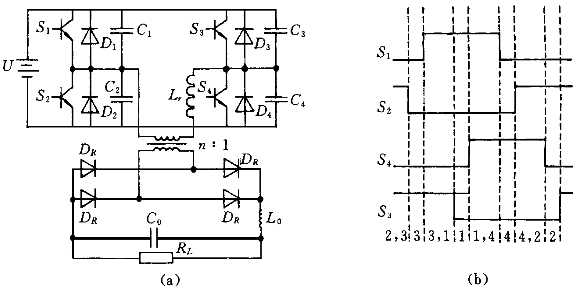
图7 移相式零电压开关的全桥变换器结构(a)和控制波形(b)
同普通的全桥电路相比,电路中增加了一个谐振电感Lr,在4个功率开关管上并联了一个电容Ci(i=1,2,3,4),Ci含开关器件的寄生电容。开关管的控制波形如图7(b)所示。其中的3,1,4,2段即死区时间,除死区时间外,电路中总是有2个开关管同时导通,共有4种组合:2和3,3和1,1和4,4和2;周而复始地工作。其中的2和3,1和4组合为全桥逆变电路,输出能量;3和1,4和2不输出能量。调节这2类组合的时间比例,即调节移相角,就可以实现输出信号的调节。电路的谐振发生在4种组合相互转换的死区时间内,每一开关周期有4次。
逆变电路参数的不同,使相位超前的桥臂开关S1和S2容易实现零电压导通,而相位滞后的桥臂开关S3和S4不太容易实现零电压导通。这就要求相应电感的选取要符合一定的条件,以满足系统谐振的要求。
进行了电源移相控制测试试验(图8)。试验结果表明,在负载一定的情况下,移相控制角由0~180°的调整,可以线性地调整电源输出电压。当移相控制角为0°时,电源输出电压为0,充电电源停止输出电流;当移相控制角为180°时,电源输出电压和输入电压基本一致,此时充电电源的输出电压最大。
经过功率变换器后的输出波形见图9(a),通过高频变压器后的波形与其相同。经整流输出后的波形如图9(b),是移相控制角为90°,变换器前置直流电压50V时的情况,这种情况下的输出电压波形接近占空比为50%的方波。
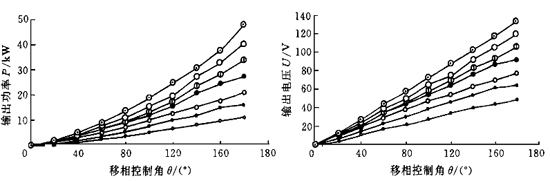
图8 移相控制角与输出功率和输出电压的关系 (a)功率变换器输出波形(变压器次级输出波形)(b)电源高频整流输出波形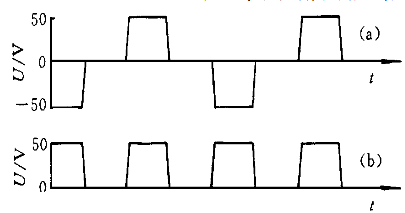
图9 测试试验中的输出波形
4 模糊控制器结构设计
系统采用了变压间歇充电法,可以适时转变充电及其间歇过程。系统通过实时控制其充电间歇过程采集蓄电池端电压。当蓄电池达到预定的停充电压时,停止充电并间歇预定的时间,然后系统调整进入下一阶段的充电过程。恒压充电过程,采用笔者提出的模糊控制方法,即在每一个恒压阶段,根据输入变量的变化进行模糊推理,决定输出变量的变化量,使充电电压保持恒定。
模糊控制器的基本结构见图10。选择蓄电池端电压的误差e和误差变化率e?作为模糊控制器的输入量,选择移相控制角作为输出变量。系统通过实时采集蓄电池的端电压,计算出误差和误差变化率,经折算后判断其所处的状态,进行模糊推理,再经清晰化,获得控制量U,通过调整移相控制角的大小,即可调整充电电压的大小。整个设计过程包括3个部分:精确模糊化,模糊推理和控制量的清晰化。
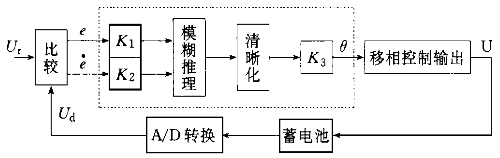
图10 双登蓄电池模糊控制器的基本结构图
关于精确模糊化,在此作一说明。本系统选定蓄电池端电压Ud的误差e(e=Ur,Ur为给定电压)及误差变化率e 作为模糊控制器的输入变量,移相控制角作为模糊控制器的输出语言变量。由于误差和误差变化率实际变化范围很大,需将它们转换到固定区域内。端电压在充电过程中总处于上升阶段,因此e的变化范围只选正半部分;考虑到误差变化率在接近出气点时数值很大,模糊语言变量可以考虑再增加PVL(正向非常大的变化)。因此e的语言变量选 PS,PM,PL,PVL;e? 的语言变量选NS,ZE,PS,PM,PL,PVL。再根据实际情况,确定输入语言变量的量化因子,输出语言变量的比例因子和隶属函数。
5 结束语
双登蓄电池快速充电方法的确定与充电效果有着密切的关系,在设计充电系统时,需要根据充电对象和系统要求确定合适的充电方法,同时根据系统要求选择相应的充电集成电路,或者设计相应的充电电源和充电电路。

